![]()

LifeOn2 Development – Force Feedback Wheel Controller Demonstration. |
| After a number of months of research, planning, and implementation LifeOn2 Development is happy to present the results of its latest project: the implementation of a FFB wheel controller.
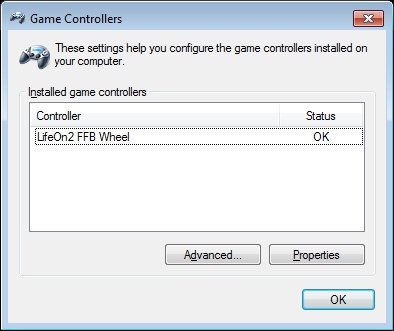
The controller is built around an ARM 32 bit RISC processor, the Cortex M3. The M3 has a wealth of peripherals, including an USB 2.0 interface, which he has programmed to communicate with a PC host. The LifeOn2 Development plan has been to use a high-performance type servo motor also for this initial FFB controller prototype, but as sourcing of a servo motor with the specifications he wanted has been an issue, He decided to use a brushed DC motor instead. It will drive a proper servo motor going forward. The status of the project now is that LifeOn2 Development has a FFB controller capable of driving a brushed DC motor (the FFB) and reading of a rotary encoder for steering wheel position. LifeOn2 Development has furthermore implemented USB communication between the FFB controller and the PC, and the FFB controller presents itself to the PC as a FFB device. The drawback of using the USB-IF specification is however that the specification and its communication protocol are quite complex and have too many features not used in an FFB simulator steering wheel. Here is a screenshot of the FFB controller (wheel) attached in Windows 7: The FFB controller is capable of receiving FFB commands at 1000 Hz, and it can report wheel position to the PC at 500 Hz. I plan to increase that to 1000 Hz too though. On top of this article is a video of the FFB controller connected to the brushed DC motor and rotary encoder and used as a FFB wheel in iRacing. As you can see, LifeOn2 Development has not bothered to attach any gearing and other devices (belts etc) to create a proper wheel, but the important stuff is all there. Gearing and other mechanical stuff are the easy parts.. So he says … |
| Article submitted by LifeOn2 Development |
|
|